

SebArtのWind S 110 Eのサンプル機が到着したので普段の仕事の合間に製作を続け、3日目でなんとか出来上がりました。販売用の製品は9月初めに入荷する予定です。ちなみにこのサンプル到着時にはマニュアルができていないので多少戸惑いと間違いが発生しましたが運良く致命傷にならずここまでこぎつけました。またデカールとスパッツがまだきていなかったのでそれらもこの後です。製作時に写真を少しづつ撮りましたので、少みていただければご自身の製作時に失敗しなくてすむと思います。

まずリンケージパーツの確認をしましょう。一番上がエルロン用のホーンやロッドです。このエルロン用ホーンの大きさは一番下の左にあるラダー用ホーンと同じですが、ホーンの穴の大きさが違いますので注意してください。エルロン用ホーンの穴は小さいです。2番目の列はエレベーター用のホーンやロッドです。ミニサーボをエレベーターに埋め込む場合は短いロッドを使います。またもし埋め込まずに標準サイズサーボを胴体横に装着する場合は2本の永さの違うロッドを使います。(サーボの位置が前後しているため長さが異なるものを使います)。一番下がラダー用ホーンなどです。右側はワイヤーリンケージを使う場合です。左側はラダーサーボを胴体後部に装着する場合に使います。ロッドが太いです。またホーンの大きさはエルロンと同じですが、穴が大きいので注意してください。なおこれらリンケージの選択は個人の好みによりますので、好きなものを選んでください。
 まずエレベーターサーボの装着です。サーボは2分割された水平尾翼の中に埋め込みます。すでにJR DS3401用の穴がキッチリ開けられさらにタッピングビスの下穴まで開けられています。穴の大きさは16X33mmくらいなのでフタバですとS 9002などが適合すると思います。
まずエレベーターサーボの装着です。サーボは2分割された水平尾翼の中に埋め込みます。すでにJR DS3401用の穴がキッチリ開けられさらにタッピングビスの下穴まで開けられています。穴の大きさは16X33mmくらいなのでフタバですとS 9002などが適合すると思います。

サーボを取り付けながらサーボリードをこの穴から引き出しておきます。こういうときにはピアノ線の先をちょっと曲げたものを穴の中に入れてだましだましサーボリードを引っ張り出します。これを引っ張り出したらサーボをタッピングビスで固定してください。もちろんその前に水平尾翼下面のフィルムを楕円形の穴に沿ってに切り取っておきます。

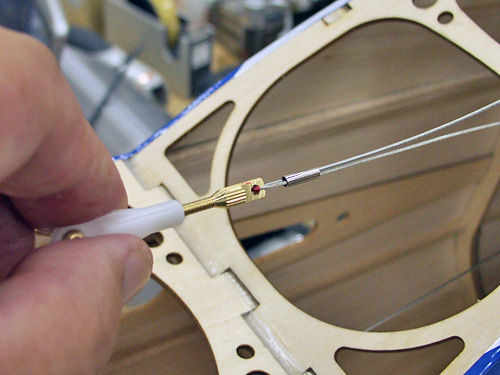
エレベータリンケージ用のロッドを作ります。パーツの中から両端にねじ切りされた一番短いピアノ線にボールリンクアジャスターをねじ込みます。このときピアノ線に傷つけないようにボールリンクを写真のようにペンチでつかみ、もう一方を4イン1ツールなどでまわすと指も痛くならず非常に簡単です。ある程度の長さになるまでねじ込んでおきます。

ピアノ線をつかんだために失敗した例です。やれやれ・・・・・・。

水平尾翼にエレベータを固定します。すでにヒンジが差し込んでありますが、再確認のうえ最低限の低粘度瞬間接着剤を流し込みます。続いてエレベーターにグラスホーンを差し込んで接着します。すべてのグラスホーンの中で一番小さいものを二つ使います。高粘度瞬間接着剤をスリットに流し込み、硬化スプレーで固めます。ある程度の長さにしたロッドの一方をグラスホーンに固定します。次にサーボのニュートラルを出しておきます。このとき便利なのがタマゾーのサーボテスターです。小さくて便利です。

サーボにJRスーパーサーボホーンの一方をカットしたものを装着します。ニュートラルの位置にキッチリ固定できるようロッドの長さを調整します。OKになったらボールリンクを固定したナットにネジロック剤をつけておきます。

完成後、横から見るとこのようになります。

同じく上から見るとこのようになります。

エルロンホーンもグラス製です。同サイズのものが3つ入っていますが、よくみるとホーンの穴が大きいものが1個あります。これはエルロン用ではありませんのでアワテテ間違わないようにしましょいう。(僕は間違えてあせりましたが、何とか一命を取りとめました。)正しいエルロン用の2枚を選択したら仮に差し込んで見ます。埋め込み部分が長く、そのまま無理に押し込むとエルロン上面を突き破ってしまいます。そこで・・・

MidWestのスーパーサンダーなどで埋め込み部分を短く削ります。

これできれいに収まるようになりましたので、やはり高粘度瞬間と硬化スプレーで固めておきます。

エレベーターと同じようにロッドを製作してエルロンのリンケージを完成させます。サーボはJR DS8401を使っています。サーボホーンはJRスーパーサーボホーンです。またサーボリードに150mmの延長ケーブルを接続して主翼中央から引き出しておきます。フタバですとS 9151などが適合すると思います。

ところで胴体の奥を覗き込んでみたところ、搬送途中で押されたためか胴枠の中央部が折れていました。よくあることで、中粘度瞬間をたらし硬化スプレーをかけておきました。他に痛んでいるところがあれば補修しておきます。

続いてラダーの工程に入ります。付属のテールギア用ピアノ線の先を曲げてラダー下に作ったスリットと穴に接着します。高粘度瞬間を流し込み、硬化スプレーで固めます・・・・。固まってしまってから気がつきました。胴体下部と接合するためのアルミプレートとストッパーを装着するのを忘れてしまいました!!なんとか取り外そうとがんばりましたが、こういうときに限ってメチャクチャにがっちり固まっています。特に致命傷ではないのであきらめてこのままにしました。

ラダーは2通りのコントロール方法があります。ひとつは胴体後部にラダーサーボを取り付けてロッドでコントロールする方法。このときは付属品のうち黒のボールリンクアジャスターと太いピアノ線、そして穴の大きいグラスホーンを使います。しかしいずれにせよこの場合はいわゆる「片引き」になります。今回はスタント機ということもあり「両引き」のワイヤーリンケージを採用することにしました。この場合もすべてのパーツが同梱されています。まずブーメランのような形状のグラスホーンをラダーに差し込みます。しかしなぜかスリットが大きく、ホーンを差し込んでもユルユルです。仕方ないのでまず差し込んでから隙間に高粘度瞬間(瞬間には固まらないので大丈夫)を流し込み前後左右、上下から見て左右対称になるよう何度も確認します。これは重要です。これがずれると左右均等に動作しなくなりますので注意してください。決まったところでそーっと再度高粘度瞬間をたらし硬化スプレーを吹いて固めます。

続いてラダーを垂直尾翼に固定します。一応ヒンジは差し込まれていますが何度も仮止めして垂直に固定されるか確認してください。もし曲がっているようであればヒンジスリットを切り直します。スムーズにラダーが動くことを確認してください。それからナイロンコーティングされたワイヤーを胴体の中へ胴体後部に開けられた穴から通します。穴はフィルムでふさがれていますが、指で探ってみると場所が確認できますので、鋭いホビーナイフでフィルムを切り取ります。その上でワイヤーの一方をラダー本にボールリンクアジャスターとともに取り付けます。真鍮のアジャスターは半分ほどねじ込んでおきます。後でねじ込んでワイヤーのテンションをあげる余力を残しておきます。

胴体内部のラダーサーボにもボールリンクアジャスターと真鍮のアジャスターを取り付けます。それから先ほど胴体後部から差し込んだワイヤーを引っ張り真鍮アジャスターの穴位置のところに印をつけます。そしてアジャスター類をホーンから一旦はすしてワイヤーを取り付けます。
印をつけたところがちょうど穴位置に合うようワイヤーを折り曲げ、カシメチューブに折り返してペンチなどでカシメます。それから余分なワイヤーを切り落とし再度胴枠スリットを通します。

両側同じように接続します。それから両方のワイヤーのテンションを上げるべく、何度もボールリンクをはずして調整しながらしめこんでゆきます。このときズルして真鍮アジャスターだけをしめないこと、ワイヤーがねじれてしまいます。なおワイヤーは胴体内部でクロスします。またカシメチューブが胴枠スリットにあたるようであれば、そのつぶしたチューブが水平になるようにしてください。このときももちろんサーボのニュートラルを確認して調整を行います。なおラダーサーボは金属ギアのJR DS8421を使用しました。ホーンはスーパーサーボホーンを使いました。

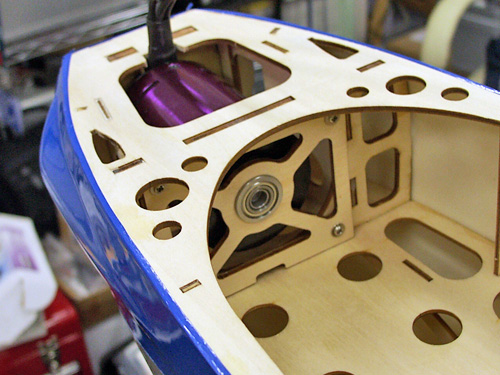
今回はHacker A50-16Lモーターを使いました。固定はM4の首下12mm長のキャップボルトを使いました。(これは付属していませんので別途用意してください)ケーブルが上から出すようにします。胴枠がぶつかりますのでケーブルの出口付近を削り取っておきます。

モーターのリアエンドは付属のベニア枠とフランジ付ボールベアリングで固定します。このベアリングはA50用アジャスタブルモーターマウントに付属しているものですが、このサンプルには付属していませんでした。(キット販売s時にはキットに同梱させる予定です。)ベニア枠にベアリングをはめ込みモーターのリア部分に差し込みます。うまく入らないときは木槌のようなやわらかいもので少したたいて圧入してください。ただし無理は絶対禁物なのであくまでもゆっくりやわらかく挿入してください。モーターのローター部分を手で回してみて抵抗なく回ればOKです。
四隅の穴にタッピングビスをねじ込んでベニア枠を固定してください。下穴が開けられていますのでスムーズに作業ができると思います。これでモーターの前と後ろががっちりホールドされ、大径のペラをまわしてもぶれる事がなくなります。

次にスピコンを搭載します。今回は最近発売したばかりのMASTER BASIC 90 OPTOを搭載しました。ファームウエアのパラメータを必要にして十分な機能だけに簡素化した低価格モデルです。ただしサーキットボードやFETなどはSPINとまったく同じパーツを使ったJETI社製造のハイエンドスピコンです。もちろんJETI BOXでプログラムが可能です。専用の取り付け板が胴体側面に組み込まれていますが、両面テープ用なので、取り外しも可能なようにと少し大きめのベニアをさらに貼り付けその上にスピコンをネジ止めしました。
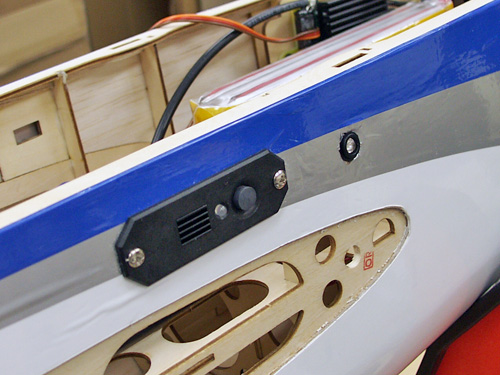
続いて電装系のパーツを取り付けてゆきます。PowerBox社のレギュレータ付エレクトリックスイッチDigiSwitch用の穴が最初から胴体横に設けられていますが、あまりにぴったりのサイズなのではめ込むときは少しだけやすりで拡げてください。前方の丸いLEDはPowerBox社リポバッテリーパックの監視用LEDランプです。このランプが点灯したときは充電の必要があります。

PowerBox社のリポバッテリーパックをネジ止めします。このリポバッテリーパックには7.4V1500のリポと充電器およびバランサーが内蔵されています。この7.4VをDigiSwitchと接続し、6.0V前後に降圧して受信機へ電気を供給します。
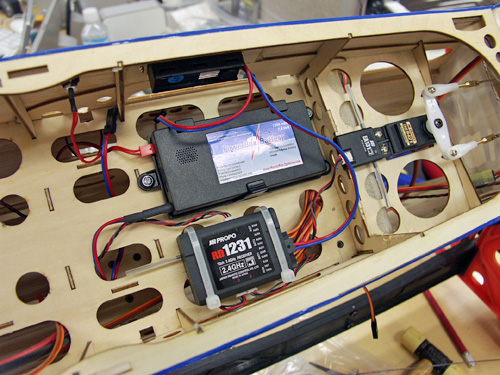
プロポは2.4Gの12チャンネルを使用しました。各エクストラアンテナのアンテナ部にノイズレスパイプを差込み、曲がらないようにしました。このことでマルチアングルに搭載したアンテナがうまく機能するようにしました。なおエルロンサーボと接続するためのケーブルとして230mmのものを受信機のエルロンchとAUX1にそれぞれ接続し、胴体横に出しておきます。

最後にランディングギアを取り付けますが、べじあなが胴体底部なのでなかなか手が届きません。こんなときはマグネットがついたピックアップツールが便利でした。

水平尾翼をカーボンパイプとともに差し込んでみると下反角がつけられているのがよくわかります。ちなみに両エレベーターサーボと受信機の接続は1000mmの延長ケーブルと150mmの延長ケーブルを接続しました。2度とエレベーターをはずさないのであれば1000mmだけで大丈夫だと思いますが、はずすことを考えるともう少し長さが必要です。
とにかく完成しました。舵角の設定やアンプの設定を残すばかりになりました。それからデカールを張ることにします。普通どおりサーボを搭載してバッテリーを配置すると若干前重になりますので、重心位置がカンザシ前縁とそのすぐ前にある胴枠との間くらいになるよう調整してください。

